Two bionic robotic fish resembling small sharks have appeared in West Lake, Hangzhou, China. They are capable of retrieving lost electronic devices and other items from the lake, as well as monitoring alien species introduced by the public releasing animals into the water.

Jointly developed by the Public Security Bureau of Hangzhou West Lake Scenic Area and the Institute of Automation of the Chinese Academy of Sciences, this bionic robot fish is designed for underwater operations in West Lake. Below is a detailed introduction:
1. Design
Modeled after the common local carp, the bionic robot fish has a body length of approximately 60-70 cm and is covered with realistic dark gray silicone fish skin. Weighing only 4-5 kg, it can be lifted with one hand. Its body features a streamlined shape: two underwater cameras are embedded in the head (serving as the “eyes” of the fish); the trunk encloses a sealed cabin that houses batteries and a control system; and the tail, made of flexible materials, can simulate the left-right sway of real fish. With a sway frequency ranging from 1 to 5 Hz and a propulsion speed of up to 0.3 meters per second, it generates almost no obvious water disturbance when swimming in shallow water.

2. Core Functions
- Precision Salvage: By setting a search area via a remote controller, the robot fish’s inertial navigation system calculates its real-time position. Its head-mounted visual sensors can identify items such as mobile phones and wallets in turbid water, and when combined with the metal detection module at the bottom, the positioning error is within 10 cm.
- Water Quality Monitoring: Equipped with water quality sensors, it collects data including water temperature and pH value, providing directions for subsequent pollution source investigation.
- Ecological Observation & Protection: High-resolution visual sensors automatically capture images of aquatic plants and animals to support the prevention and control of alien species. When approaching waterfowl habitats, it slows down automatically and can independently avoid obstacles such as underwater rocks and aquatic plants.
3. Communication Methods
The bionic robot fish mainly uses a hybrid communication mode (underwater acoustic communication + short-range radio communication) to maintain contact with the shore or mother ship:
3.1 Underwater Acoustic Communication (Primary Method)
Electromagnetic waves attenuate rapidly underwater, so sound waves are mainly used for signal transmission. The robot fish is equipped with an underwater acoustic modem, which transmits video, sensor data, and position information to buoys or shore-based base stations via sound waves of specific frequencies (usually 20–50 kHz). The delay generally ranges from hundreds of milliseconds to several seconds, which is greatly affected by water quality and distance.
3.2 Radio Communication (Auxiliary/Near-Surface Method)
When the robot fish is close to the water surface, it extends a small waterproof antenna and communicates directly with the control center using the 2.4 GHz or 5.8 GHz frequency band. This method offers high data transmission rates, making it suitable for transmitting high-definition images at high speed, but it is basically unavailable in deep-water environments.
3.3 Communication Relay
In some designs, fixed underwater acoustic nodes or floating communication buoys are deployed in West Lake to form a small communication network, ensuring the robot fish maintains stable connectivity even in long-distance or complex water areas.
4. Schematic Diagram of the Robot Fish’s Communication Link
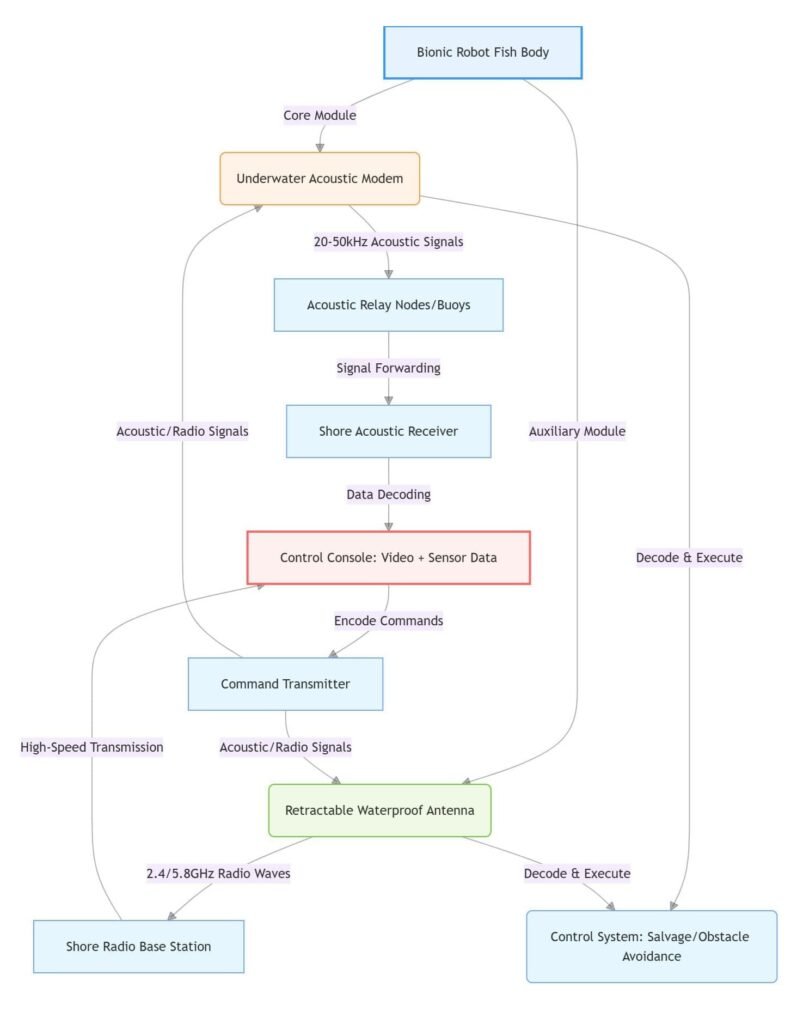
graph TD A[Bionic Robot Fish Body] –>|Core Communication Module| A1(Underwater Acoustic Modem) A –>|Auxiliary Communication Module| A2(Retractable Waterproof Antenna)
Underwater Communication Link A1 –>|20-50kHz Acoustic Signals| B[Underwater Acoustic Relay Node/Buoy-Mounted Receiver] B –>|Signal Relaying| C[Shore-Based Control Center – Underwater Acoustic Receiving Terminal] C –>|Data Parsing| D[Control Center Display Console: Real-Time Video, Water Quality Data, Position Info]
Near-Surface Communication Link A2 –>|2.4GHz/5.8GHz Radio Waves| E[Shore-Based Control Center – Radio Receiving Base Station] E –>|High-Speed Data Transmission| D
Reverse Link for Control Commands D –>|Command Encoding| F[Control Center Command Transmission Module] F –>|Acoustic/Radio Signals| A1 & A2 A1 & A2 –>|Command Decoding| A3(Robot Fish Control System: Execute Salvage, Obstacle Avoidance, Path Adjustment) |
Key Explanations for the Schematic Diagram
- Logic of Dual-Communication Link Design
- Underwater, underwater acoustic communication(A1→B→C) is prioritized to address signal penetration issues in West Lake’s 1-3 meter water depth. It covers a range of 100-300 meters, meeting the needs of full-lake operations.
- When near the water surface (water depth < 0.5 meters), it switches to radio communication(A2→E), with the data transmission rate increased to 10-50 Mbps, enabling fast transmission of high-definition salvage videos (captured by underwater cameras).
- Relay and Redundancy Guarantee
The “underwater acoustic nodes + floating communication buoys” (B) deployed in West Lake prevent signal blockage by underwater aquatic plants and rocks, ensuring the robot fish has no communication dead zones in complex areas such as Su Causeway and Three Pools Mirroring the Moon.
- Two-Way Interaction Capability
The control center (D) can not only receive sensor data from the robot fish but also issue commands (e.g., adjusting salvage posture, setting new search areas) through the same link. The command response delay is < 2 seconds, meeting the requirements of real-time control.